![]()
![]()
![]()
![]()
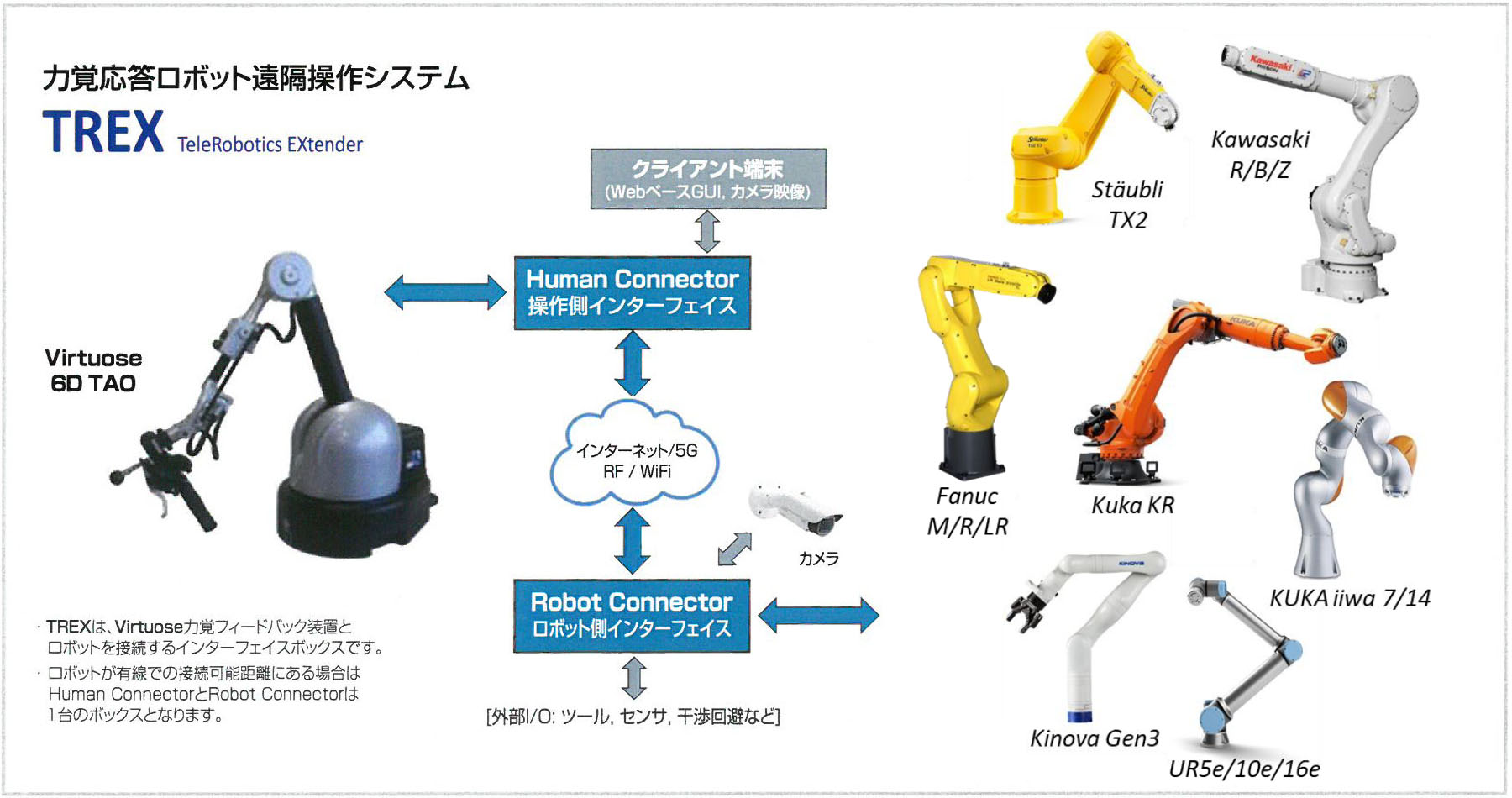
Haption 力覚応答ロボット遠隔操作システム
|
力覚フィードバック装置 Virtuose 6D TAO |
力覚応答による遠隔操作 危険作業や過酷環境下における省人化のための ロボットによる遠隔操作広く適用される中、 操作用装置として力覚フィードバック装置を 使用することで、正確で安全な遠隔操作が可能 となります。 ロボットの関節制限や動きの慣性力を作業者が その腕で感じることで、大型の産業用ロボット を的確に制御することができます。 あるいはロボットの干渉や不可を感知すること で、ロボット本体や周囲環境への接触事故を 回避することができます。 視覚のみでのロボット遠隔操作に力覚応答が 加わることで、正確性や安全性の向上ばかりで なく、操作が格段に容易になり、作業者の負担 を大幅に軽減します。 作業環境やsの内容、求められる作業品質などの 条件に応じた理想的なロボット遠隔操作を実現 するための、多様な力覚提示装置を用いた システムを提供します。 |
|||||||
 |
||||||||
|
||||||||
力覚応答の利点
・ ロボットの 「動き・接触・慣性・重量」 を感じる
容易なロボット操作
ジョイスティックなど触覚応答のないマスター装置は視覚頼りの操作となり、作業者の熟練度が求められる。
安全なロボット操作
大型のスレーブロボット操作時に作業者の腕を力覚で誘導、対象や周囲環境を破壊するリスクを軽減。
力覚応答ロボット遠隔操作システムの技術的要件
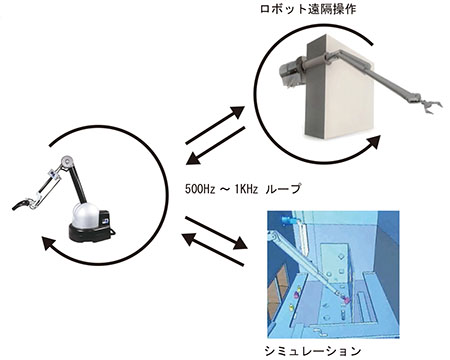
力覚応答システムでは、スレーブロボットに加えられた力を検知しマスターデバイスにその力を伝送する必要があります。
その方法は使用するロボットの条件に応じていくつかの方法があります。

・ ロボット各関節に力センサを内蔵(推奨)
・ アーム先端部(第一関節)にフォースセンサを内蔵
・ アーム先端部 - グリッパー間に6軸力センサを取り付け
・ ロボット各関節の電流値の読み取り
・ ロボットのベース部にフォースセンサを取り付け
|
また、品質の高い力覚応答には、力測定の正確さと制御APIの 動作周期の速さも重要です。スレーブロボットに求められる 応答周波数は、500Hz以上(推奨は1000Hz)となります。 コンピュータ上のシミュレーションの場合も、物理エンジンは 同等の速度で応答する必要があります (ロボットの応答周期につきましては各ロボットメーカーにお問い合わせください) |
|
アプリケーション
 航空産業 |
 自動車産業 |
 ロボティクス |
 原子力施設 |
 化学 |
 医療 |
Virtuose 6D TAOの特徴
 ・ 大きなワークスペース
・ 大きなワークスペース
人の腕全体の可動範囲をカバーする広大な動作空間
・ 軽量アームで負荷のない操作
フリクションのない軽く滑らかな操作性
・ 設置場所を選ばないコンパクト設計
どこにでも簡単に設置。上下反転や側面配置も可能
・ カスタマイズ可能なハンドル
操作ハンドル部は用途に応じて容易にカスタマイズ可能
動作確認済みロボット
| ロボットベンダー | モデル名 | 動作条件 |
|---|---|---|
| Universal Robots | UReシリーズ | Polyscope 5.9以降 |
| Kinova | Gen3 | - |
| Kawasaki Robotics | RS、BX、MS シリーズ | F60、E01、E02 コントローラー |
| FANUC | LR Mate、M & R シリーズ | software v9.30 P13が動作するController R30iBPlus RAMのアップグレード |
| KUKA | LBR iiwa 7 R800 LBR iiwa 14 R820 | KUKA Sunrise 1.16 以降、FRIおよびGripperToolbox |
| KR | KUKA ロボットインターフェース | |
| Staubli | TX2 | CS9 コントローラー およびuniVALDrive 2 |
UniversalRobots
 |
Kinova Gen3
 |
Kawasaki Robotics
 |
KUKA
 |
Scale1 CEA Marcoule - 2
 |
NCNR demonstration of Assisted Teleoperation Grasping
 |
Surgical Cockpit - Hamlyn 2019 presentation by ISIR
 |
NSソリューションズ 遠隔操作ロボット(2020)
 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.